Using gelatin and sugar as ink to print 3D soft robots
By Bob Yirka – February 7, 2022
A version of this article was first published on TechXplore
A team of researchers at Johannes Kepler University Linz has used biodegradable materials as ink to print 3D soft robots. In their paper published in the journal Science Robotics, the group describes how they developed their ink and how well it performed. Yu Jun Tan, with the National University of Singapore has published a Focus piece in the same journal issue, outlining the issues researchers have faced in creating robots out of biodegradable materials and the work done by the team in Austria.
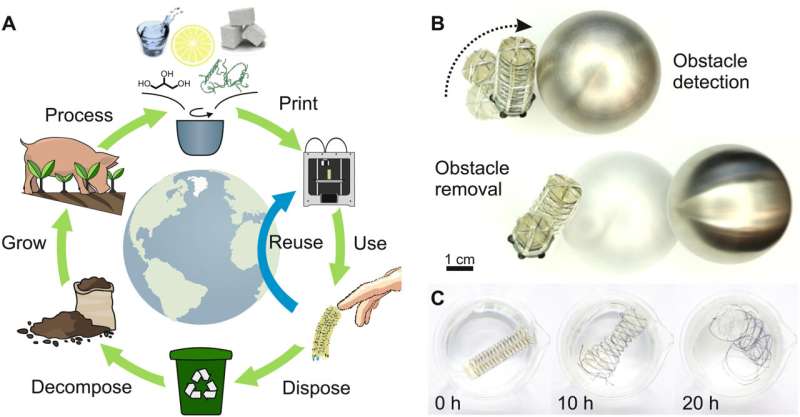
Over the past several years, researchers have been making progress toward the development of soft robots, so named due to the soft materials used to create them. Such robots have typically been created to emulate creatures that live in the water. Researchers believe this technology will one day lead to the development of tiny soft robots that can swim around inside of the body to distribute medications or to repair damaged tissue. In most cases, soft robots have been made of non-biodegradable material because biodegradable materials have limitations, including dissolution in water, molding and a limited lifespan. In this new effort the researchers have used sugar and gelatin to create jelly-like objects. Adding other materials have made their creations less inviting to mold (citric acid) and more resilient when dunked in water (glycerol). They have now experimented with variations of their recipe to create an ink that could be used to produce 3D objects.
To use the material they created, they warmed it to the point of softness that allowed it to be squirted through a printing nozzle and ran the printer in a chilly room, which allowed the ink to solidify quickly. To test their approach, the team first created a soft pneumatically driven actuator which worked as planned. They noted that the actuator could be placed back into the printer allowing for reuse of the ink. The team next printed stretchable waveguide sensors that worked in conjunction with LED lights. They then combined the waveguide with the actuator to create a functioning soft robot. Next, they connected three of the waveguides together and hooked them to a button controller which could then be used to alter the degree of deformation of the waveguides.